あなたのTinyLineMarkerロボットが「Float Fix」モードで動かなくなった場合、それは正確なGPS信号を取得するのに問題があることを意味します。このガイドでは、一般的な原因とトラブルシューティングの手順を説明し、正確なラインマーキングに戻る方法を紹介します。
TinyLineMarkerロボットはRTK(リアルタイムキネマティック)ポジショニングを使用して、高精度でラインをペイントします。ポジショニングの精度にはさまざまなレベルがあり、私たちのラインマーキングロボットは最高レベルのみを使用します。
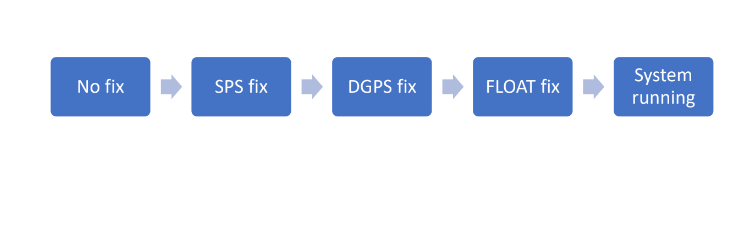
No fixは、ロボットが全く位置を把握していないことを意味します。
SPS(標準ポジショニングサービス)は、GPSシステムが最初に達成する位置修正です。各ステップが進むごとに精度が向上します。(3-10メーター)。
DGPS(差分グローバルポジショニングシステム)の精度は1-3 cmに向上します。
Float fixは、GPSポジショニングの精度が低い状態です。
System runningまたはFixは、最高レベルの精度を持つ状態です。
場合によっては、次の画像のようにロボットがFloat fixのまま動かなくなることがあります:
このような場合は、以下のトラブルシューティングガイドに従ってください。
Float fixのトラブルシューティング
ロボットは物体の近くにありますか?
最適なパフォーマンスを得るために、ロボットを車、トラクター、人、壁、フェンスなどの障害物から遠ざけてください。これらは衛星信号をブロックし、正しく動作しない原因となります。次のことを試してください:
- ロボットを障害物のない開けた場所に移動させます。
- ロボットがFIXモード(緑色のライトで示される)を取得するのを待ちます。これには数分かかることがあります。
- 問題が解決しない場合は、ロボットをクリアな場所に移動させた後、再起動します。
建物や木の近くでペイントしようとしていますか?
建物や木などの障害物は、アンテナの空の視界を遮り、信号を弱め、ロボットがFLOAT fix状態に入る原因となることがあります。ツリーフィルター機能はこのような状況で役立ちますが、非常に高い建物には効果がありません。ツリーフィルターを有効にする方法は次の通りです:
- ツリーフィルターを有効にしたいフィールドを選択します。「修正する」をタップし、「編集」を押します。
- 次のメニューで「詳細へ」をタップします。
- ツリーフィルターの色を確認し、希望するラインをオレンジ色になるまで数回タップします。その後、「OK」をタップします。
- ピッチを保存してからペイントを開始します。
ヒント: 近いオブジェクトをマークする際には、ロボットの速度を落としてGPS補正信号を受信しやすくすることで、精度を向上させることができます。
マウントポイントを変更してみましたか?
マウントポイントは、ロボットがGPS信号を取得する方法を決定します。これは使用される技術の種類、ロボットが接続する衛星、および信号の補正方法を指定します。
フロートフィックスの問題が発生している場合、ロボットのマウントポイントを手動で変更することが解決策となるかもしれません。このプロセスは即時に行われ、再起動は不要です。マウントポイントの設定は地域や国によって異なるため、利用可能なオプションのリストについてはサポートに連絡してください。マウントポイントを変更するには、次の手順に従います:
- 設定メニューを見つけてタップします (
).
- 設定メニューで "コミュニケーション設定" タブに移動し、マウントポイントテキストフィールドを見つけます。
- サポートから提供された別のマウントポイントを入力し、「保存」をタップします。保存するたびに新しい「保存された設定」が作成され、後で簡単に選択できるようになります。
- メニューを閉じて、ジョイスティックを使用してロボットを手動で制御します。これで問題が解決し、ロボットのライトが緑色に変わることを期待します。
GNSS受信機をリセットしてみましたか?
ロボットは高度なGNSSチップを使用してGPS信号を処理します。時々、チップがデータで過負荷になり、応答しなくなることがあります。これを解決するために、以下の手順に従ってNTRIPサーバー設定を調整してみてください。
- 設定メニューを見つけてタップします (
- "コミュニケーション設定" タブに入り、「NTRIPサーバー」テキストフィールドを見つけます。
- 「NTRIPサーバー」設定に小さな一時的な変更を加えます(元の設定を覚えておいてください)。「保存」を押すと、NTRIPサーバーエラーが発生するはずです。設定を元に戻して再度「保存」を押します。
ロボットはGPSプロバイダーに再接続し、新しいGPSデータをダウンロードします。これにより、Fixソリューションが得られるはずです。ジョイスティックを使用してロボットを少し動かす必要があるかもしれません。
または、ロボットを3~5分間オフにしてみてください。これにより、GNSS受信機のキャッシュがクリアされ、接続がリセットされることもあります。
浮動修正を引き起こすその他の要因
私たちの制御外の多くの要因がFLOAT修正の問題を引き起こす可能性があります。上記の解決策がいずれも機能しない場合は、こちらからサポートにお問い合わせください。
これらの問題には以下が含まれる可能性があります:
- GNSSプロバイダーの問題。
- GPS基準局がオフライン。
- GPS基準局が遠すぎる。
- 混在する雲や悪天候。
- 高い太陽活動