当使用机器人收集点时,机器人面向的方向对于准确的场地布局和线标记至关重要。根据场地类型和您使用的具体收集方法,机器人的方向会有所不同。本指南将提供详细的说明和插图,以确保您的机器人在为各种场地类型收集点时面向正确的方向。
矩形模板
根据所选的收集方法,矩形场地的点应使用角落、边缘和球门柱进行收集。下图中的箭头表示机器人前方应面向的方向:
这些收集方法适用于足球、橄榄球、美式足球、长曲棍球、盖尔式足球、田径短跑和旗帜足球等模板。虽然并非所有场地都会使用所示的每种方法,但点收集方向保持不变。
澳式足球
虽然澳式足球场是椭圆形的,但它们遵循上述的“4个角落+4个球门柱”方法,除了单独的换人门,应按下图所示方向收集:
棒球和垒球
由于棒球和垒球场地的独特形状,需要特定的收集方法:
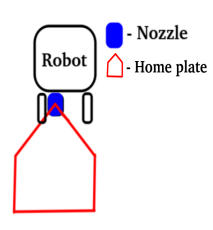
请参阅图表,以便在本垒、垒包、草线和界外线收集点时准确放置机器人:
- 本垒:
- 垒包:
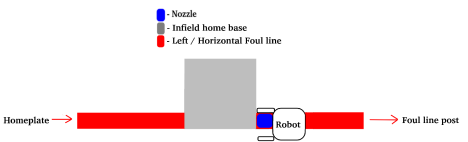
- 草线:
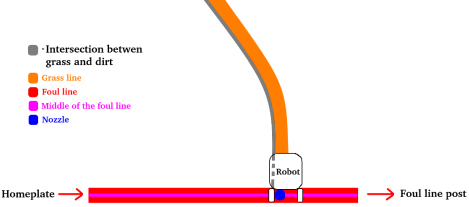
- 界外线:
田径
田径模板有多种收集方法:
- 跑道模板: 逆时针收集点。
- 场地模板:有两种收集方法可用。确保踢板上的点与其切线相切。
-
圆场: 此模板使用击球方形的两个角来固定场地位置,有一种收集方法。
通过遵循这些指南,您将确保您的TinyLineMarker机器人能够准确高效地设置场地。如果您有任何问题,请咨询我们的支持团队。