Als je TinyLineMarker-robot vastzit in de 'Float Fix'-modus, betekent dit dat hij moeite heeft om een nauwkeurig GPS-signaal te krijgen. Deze gids leidt je door veelvoorkomende oorzaken en stappen voor probleemoplossing om je weer terug te brengen naar nauwkeurige lijnmarkering.
De TinyLineMarker-robots gebruiken RTK (Real-Time Kinematic) positionering om lijnen met hoge nauwkeurigheid te verf. Er zijn verschillende niveaus van positioneringsnauwkeurigheid, en onze lijnmarkeringsrobots gebruiken alleen het hoogste niveau.
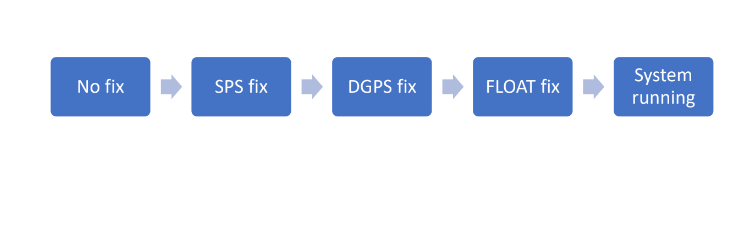
Neen fix betekent dat de robot helemaal geen idee heeft van zijn positie.
SPS (Standard Positioning Service) is de eerste positiefix die GPS-systemen bereiken. Elke volgende stap bereikt een hoger niveau van nauwkeurigheid. (3-10 meter).
DGPS (Differential Global Positioning System) de nauwkeurigheid neemt toe tot 1-3 cm.
Float fix is een minder nauwkeurige GPS-positioneringstoestand.
Systeem loopt ook wel bekend als Fix is de toestand met het hoogste nauwkeurigheidsniveau.
In sommige gevallen kun je ervaren dat de robot vastzit in Float fix zoals te zien is op deze foto:
Als dit het geval is, volg dan de onderstaande probleemoplossingsgids.
Float fix probleemoplossing
Is de robot nabij objecten?
Voor optimale prestaties, houd de robot vrij van obstakels zoals auto's, tractoren, mensen, muren en hekken. Deze kunnen de satellietsignalen blokkeren en voorkomen dat ze correct werken. Probeer het volgende:
- Beweeg de robot naar een open gebied weg van mogelijke obstakels.
- Wacht tot de robot de FIX-modus verkrijgt (aangegeven door een groen licht). Dit kan enkele momenten duren.
- Als het probleem aanhoudt, herstart de robot nadat je hem naar een vrije locatie hebt verplaatst.
Probeer je nabij gebouwen of bomen te verven?
Obstakels, zoals gebouwen en bomen, kunnen het zicht van de antenne op de lucht belemmeren, het signaal verzwakken en mogelijk ervoor zorgen dat de robot in een FLOAT-fix toestand komt. De Boomfilter-functie kan in dergelijke situaties helpen, maar is niet effectief voor zeer hoge gebouwen. Hier is hoe je de Boomfilter activeert:
- Selecteer het veld waar je de Boomfilter wilt inschakelen. Tik op "Wijzigen", en druk vervolgens op "Bewerken".
- Tik in het volgende menu op "Geavanceerd".
- Let op de kleur van de Boomfilter en tik meerdere keren op de gewenste lijnen totdat deze oranje wordt. Tik vervolgens op "OK".
- Bewaar het veld en begin dan met verven.
Tip: Probeer de robot te vertragen bij het markeren van nabijgelegen objecten om zijn vermogen om GPS-correctiesignalen te ontvangen te verbeteren. Dit kan zijn nauwkeurigheid vergroten.
Heb je geprobeerd het mount point aan te passen?
Het mount point bepaalt hoe de robot zijn GPS-signaal ontvangt. Het specificeert het type technologie dat wordt gebruikt, welke satellieten de robot verbindt en hoe de signalen worden gecorrigeerd.
Als je problemen hebt met float fix, kan een oplossing zijn om handmatig het mount point op de robot aan te passen. Dit proces is direct en vereist geen herstart. Mount point-configuraties variëren per regio of land, dus neem contact op met support voor een lijst van beschikbare opties in jouw gebied. Om het mount point aan te passen, kun je de volgende stappen volgen:
- Zoek en tik op het instellingenmenu (
).
- Ga in het instellingenmenu naar het tabblad "Communicatie" en zoek het tekstveld Mount Point.
- Typ een ander mount point in dat door support is verstrekt en tik op "Bewaren". Elke keer dat je bewaart, wordt er een nieuwe set "opgeslagen instellingen" gemaakt, waardoor het later gemakkelijk is om uit te kiezen.
- Sluit het menu en bestuur de robot handmatig met de joystick. Dit zou hopelijk het probleem moeten oplossen en het robotlicht groen moeten maken.
Heb je geprobeerd de GNSS-ontvanger te resetten?
De robot gebruikt een geavanceerde GNSS-chip om GPS-signalen te verwerken. Soms kan de chip overbelast raken met gegevens en niet meer reageren. Om dit op te lossen, probeer de NTRIP-serverinstellingen aan te passen zoals hieronder beschreven.
- Zoek en tik op het instellingenmenu (
- Ga naar het tabblad "Communicatie" en zoek het tekstveld "NTRIP-server".
- Maak een kleine, tijdelijke wijziging in de instelling "NTRIP-server" (onthoud de oorspronkelijke instelling). Druk op "Bewaren", wat een NTRIP-serverfout zou moeten veroorzaken. Zet de instelling terug naar de oorspronkelijke en druk opnieuw op "Bewaren".
De robot zal opnieuw verbinding maken met de GPS-provider en nieuwe GPS-gegevens downloaden. Dit zou moeten resulteren in een Fix-oplossing. Mogelijk moet u de robot kort rondrijden met behulp van de joystick.
Probeer anders de robot 3 tot 5 minuten uit te schakelen. Dit kan ook de cache van de GNSS-ontvanger wissen en de verbinding resetten.
Overige factoren die een float fix kunnen veroorzaken
Veel factoren buiten onze controle kunnen FLOAT fix problemen veroorzaken. Als geen van de bovenstaande oplossingen werkt, neem dan contact op met de ondersteuning hier.
Deze problemen kunnen onder andere zijn:
- Problemen met de GNSS-provider.
- GPS-referentiestations offline.
- GPS-referentiestations zijn te ver weg.
- Gemengde wolken of slechte weersomstandigheden.
- Hoge zonneactiviteit