Se il tuo robot TinyLineMarker rimane bloccato in modalità 'Float Fix', significa che sta avendo difficoltà a ottenere un segnale GPS accurato. Questa guida ti guiderà attraverso le cause comuni e i passaggi di risoluzione dei problemi per tornare a marcare le linee con precisione.
I robot TinyLineMarker utilizzano il posizionamento RTK (Real-Time Kinematic) per verniciare le linee con alta precisione. Esistono diversi livelli di precisione del posizionamento, e i nostri robot per la marcatura delle linee utilizzano solo il livello più alto.
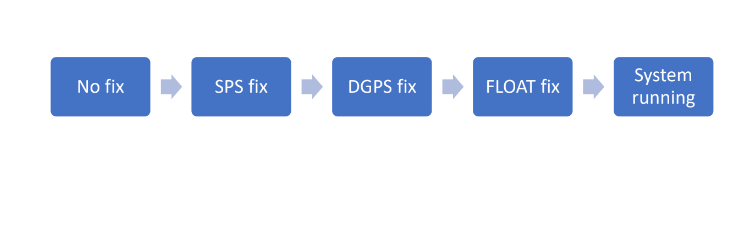
No fix significa che il robot non ha alcuna percezione della sua posizione.
SPS (Standard Positioning Service) è la prima posizione che i sistemi GPS raggiungono. Ogni passo successivo raggiunge un livello maggiore di precisione. (3-10 metri).
DGPS (Differential Global Positioning System) la precisione aumenta a 1-3 cm.
Float fix è uno stato di posizionamento GPS meno accurato.
Sistema in esecuzione anche noto semplicemente come Fix è lo stato con il livello più alto di precisione.
In alcuni casi, potresti riscontrare che il robot rimane bloccato su Float fix come mostrato in questa immagine:
Se questo è il tuo caso, segui la guida di risoluzione dei problemi mostrata di seguito.
Risoluzione dei problemi di Float fix
Il robot è vicino a qualche oggetto?
Per prestazioni ottimali, tieni il robot lontano da ostacoli come auto, trattori, persone, muri e recinzioni. Questi possono bloccare i segnali satellitari e impedire loro di funzionare correttamente. Prova quanto segue:
- Sposta il robot in un'area aperta lontano da potenziali ostacoli.
- Attendi che il robot acquisisca la modalità FIX (indicata da una luce verde). Questo potrebbe richiedere alcuni momenti.
- Se il problema persiste, riavvia il robot dopo averlo spostato in una posizione libera.
Stai cercando di verniciare vicino a edifici o alberi?
Ostacoli, come edifici e alberi, possono ostruire la visuale dell'antenna verso il cielo, indebolendo il segnale e potenzialmente causando l'ingresso del robot in uno stato di FLOAT fix. La funzione Filtro anti-albero può aiutare in tali situazioni, ma non è efficace per edifici molto alti. Ecco come attivare il Filtro anti-albero:
- Seleziona il campo in cui desideri abilitare il Filtro anti-albero. Tocca "Modifica", quindi premi "Modifica".
- Nel menu successivo, tocca "Avanzate".
- Nota il colore del Filtro anti-albero e tocca le linee desiderate più volte fino a quando non diventa arancione. Quindi tocca "OK".
- Salva il campo e poi inizia a verniciare.
Consiglio: Quando si segnano oggetti vicini, prova a rallentare il robot per migliorare la sua capacità di ricevere segnali di correzione GPS. Questo potrebbe aumentare la sua precisione.
Hai provato a cambiare il punto di montaggio?
Il punto di montaggio determina come il robot ottiene il segnale GPS. Specifica il tipo di tecnologia utilizzata, a quali satelliti il robot si connette e come vengono corretti i segnali.
Se hai problemi con il fix flottante, una soluzione potrebbe essere cambiare manualmente il punto di montaggio sul robot. Questo processo è immediato e non richiede un riavvio. Le configurazioni del punto di montaggio variano per regione o paese, quindi per favore contatta il supporto per un elenco delle opzioni disponibili nella tua area. Per cambiare il punto di montaggio, puoi seguire questi passaggi:
- Individua e tocca il menu delle impostazioni (
).
- Nel menu delle impostazioni, vai alla scheda "Comunicazione" e trova il campo di testo Punto di Montaggio.
- Digita un punto di montaggio diverso fornito dal supporto e tocca "Salva". Ogni volta che salvi, viene creato un nuovo set di "impostazioni memorizzate", rendendo facile scegliere in seguito.
- Chiudi il menu e poi controlla manualmente il robot usando il joystick. Questo dovrebbe risolvere il problema e far diventare la luce del robot verde.
Hai provato a ripristinare il ricevitore GNSS?
Il robot utilizza un chip GNSS avanzato per elaborare i segnali GPS. A volte il chip può sovraccaricarsi di dati, diventando non responsivo. Per risolvere questo problema, prova a regolare le impostazioni del server NTRIP come descritto di seguito.
- Individua e tocca il menu delle impostazioni (
- Entra nella scheda "Comunicazione" e trova il campo di testo "Server NTRIP".
- Effettua una piccola modifica temporanea all'impostazione del "Server NTRIP" (ricorda l'impostazione originale). Premi "Salva", il che dovrebbe attivare un errore del server NTRIP. Ripristina l'impostazione originale e premi di nuovo "Salva".
Il robot si riconnetterà al fornitore di GPS e scaricherà nuovi dati GPS. Questo dovrebbe risultare in una soluzione Fix. Potrebbe essere necessario guidare brevemente il robot utilizzando il joystick.
In alternativa, prova a spegnere il robot per 3-5 minuti. Questo può anche cancellare la cache del ricevitore GNSS e ripristinare la sua connessione.
Altri fattori che possono causare il fix float
Molti fattori al di fuori del nostro controllo possono causare problemi di fix FLOAT. Se nessuna delle soluzioni sopra indicate funziona, contatta il supporto qui.
Questi problemi possono includere:
- Problemi con il fornitore di GNSS.
- Stazioni di riferimento GPS offline.
- Stazioni di riferimento GPS troppo lontane.
- Nuvole miste o condizioni meteorologiche avverse.
- Alta attività solare