Lors de la collecte de points avec votre robot, la direction dans laquelle le robot est orienté est cruciale pour une disposition précise du terrain et un marquage des lignes. Selon le type de terrain et la méthode de collecte spécifique que vous utilisez, l'orientation du robot variera. Ce guide fournira des instructions détaillées et des illustrations pour s'assurer que votre robot est orienté dans la bonne direction lors de la collecte de points pour divers types de terrains.
Modèles rectangulaires
Selon la méthode de collecte sélectionnée, les points pour les terrains rectangulaires doivent être collectés en utilisant les coins, les côtés et les poteaux de but. Les flèches dans les images ci-dessous indiquent la direction dans laquelle l'avant du robot doit être orienté :
Ces méthodes de collecte s'appliquent aux modèles comme le football, le rugby, le football américain, le lacrosse, le football gaélique, le sprint d'athlétisme et le football flag. Bien que tous les terrains n'utilisent pas toutes les méthodes montrées, la direction de collecte des points reste la même.
Football australien
Bien que les terrains de football australien soient de forme ovale, ils suivent la méthode "4 coins + 4 poteaux de but" illustrée ci-dessus, sauf pour les portes d'échange séparées, qui doivent être collectées dans la direction indiquée ci-dessous :
Base-ball et Softball
Les terrains de base-ball et de softball, en raison de leurs formes uniques, nécessitent des méthodes de collecte spécifiques :
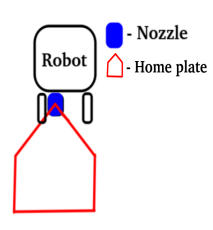
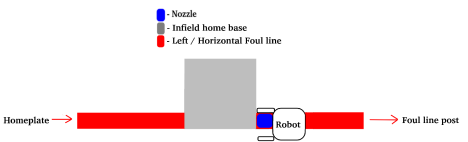
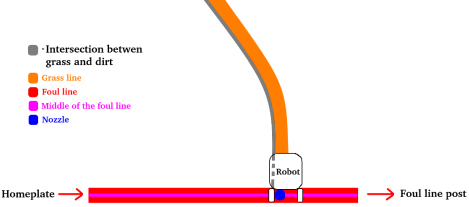
Référez-vous aux diagrammes pour un placement précis du robot lors de la collecte des points à la plaque d’origine, aux bases, à la ligne de gazon et aux lignes de faute :
- Plaque d’origine :
- Bases :
- Ligne de gazon :
- Ligne de faute :
Athlétisme
Les modèles d'athlétisme ont diverses méthodes de collecte :
- Modèles de piste : Collecter les points dans le sens inverse des aiguilles d'une montre.
- Modèles de terrain : Deux méthodes de collecte sont disponibles. Assurez-vous que le point au coin du kickboard est tangent à celui-ci.
-
Base-Ball : Ce modèle a une méthode de collecte utilisant deux coins du carré de frappe pour fixer la position du terrain.
En suivant ces directives, vous assurerez une configuration de terrain précise et efficace pour votre robot TinyLineMarker. Si vous avez des questions, veuillez consulter notre équipe de support.