Si tu robot TinyLineMarker se queda atascado en el modo 'Float Fix', significa que está teniendo problemas para obtener una señal GPS precisa. Esta guía te llevará a través de las causas comunes y los pasos de solución de problemas para que vuelvas a marcar líneas con precisión.
Los robots TinyLineMarker utilizan posicionamiento RTK (Cinemática en Tiempo Real) para pintar líneas con alta precisión. Existen diferentes niveles de precisión de posicionamiento, y nuestros robots de marcado de líneas utilizan solo el nivel más alto.
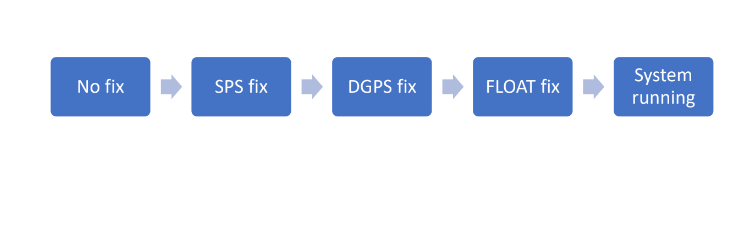
No fix significa que el robot no tiene ningún sentido de su posición en absoluto.
SPS (Servicio de Posicionamiento Estándar) es la primera posición que logran los sistemas GPS. Cada paso sucesivo logra un mayor nivel de precisión. (3-10 metros).
DGPS (Sistema de Posicionamiento Global Diferencial) la precisión aumenta a 1-3 cm.
Float fix es un estado de posicionamiento GPS menos preciso.
Sistema en funcionamiento también conocido simplemente como Fix es el estado con el nivel más alto de precisión.
En algunos casos, podrías experimentar que el robot se queda atascado en Float fix como se ve en esta imagen:
Si este es tu caso, sigue la guía de solución de problemas que se muestra a continuación.
Solución de problemas de Float fix
¿Está el robot cerca de algún objeto?
Para un rendimiento óptimo, mantén el robot despejado de obstrucciones como coches, tractores, personas, paredes y cercas. Estos pueden bloquear las señales de los satélites e impedir que funcionen correctamente. Intenta lo siguiente:
- Mueve el robot a un área abierta lejos de cualquier posible obstrucción.
- Espera a que el robot adquiera el modo FIX (indicado por una luz verde). Esto puede tardar unos momentos.
- Si el problema persiste, reinicia el robot después de moverlo a una ubicación despejada.
¿Estás intentando pintar cerca de edificios o árboles?
Obstáculos, como edificios y árboles, pueden obstruir la vista de la antena hacia el cielo, debilitando la señal y potencialmente causando que el robot entre en un estado de FLOAT fix. La función de Filtro de Árbol puede ayudar en tales situaciones, pero no es efectiva para edificios muy altos. Aquí te mostramos cómo activar el Filtro de Árbol:
- Selecciona el campo donde deseas habilitar el Filtro de Árbol. Toca en "Modificar", luego presiona "Editar".
- En el siguiente menú, toca en "Avanzado".
- Nota el color del Filtro de Árbol y toca las líneas deseadas varias veces hasta que se vuelva naranja. Luego toca "Aceptar".
- Guardar el campo y luego empezar a pintar.
Consejo: Al marcar objetos cerca, intenta reducir la velocidad del robot para mejorar su capacidad de recibir señales de corrección GPS. Esto podría aumentar su precisión.
¿Has intentado cambiar el punto de montaje?
El punto de montaje determina cómo el robot obtiene su señal GPS. Especifica el tipo de tecnología utilizada, a qué satélites se conecta el robot y cómo se corrigen las señales.
Si tienes problemas con la corrección flotante, una solución podría ser cambiar manualmente el punto de montaje en el robot. Este proceso es inmediato y no requiere un reinicio. Las configuraciones del punto de montaje varían según la región o el país, así que por favor contacta con el soporte para obtener una lista de opciones disponibles en tu área. Para cambiar el punto de montaje, puedes seguir estos pasos:
- Localiza y toca el menú de ajustes (
).
- En el menú de ajustes, ve a la pestaña "Comunicación" y encuentra el campo de texto del Punto de Montaje.
- Escribe un punto de montaje diferente proporcionado por el soporte y toca "Guardar". Cada vez que guardes, se crea un nuevo conjunto de "ajustes almacenados", lo que facilita la selección más adelante.
- Cierra el menú y luego controla manualmente el robot usando el joystick. Esto debería resolver el problema y hacer que la luz del robot se vuelva verde.
¿Has intentado restablecer el receptor GNSS?
El robot utiliza un chip GNSS avanzado para procesar señales GPS. A veces, el chip puede sobrecargarse con datos y volverse no responsivo. Para resolver esto, intenta ajustar los ajustes del servidor NTRIP como se describe a continuación.
- Localiza y toca el menú de ajustes (
- Entra en la pestaña "Comunicación" y encuentra el campo de texto "Servidor NTRIP".
- Haz un cambio menor y temporal en la configuración del "Servidor NTRIP" (recuerda la configuración original). Presiona "Guardar", lo que debería desencadenar un error del servidor NTRIP. Vuelve a la configuración original y presiona "Guardar" nuevamente.
El robot se volverá a conectar al proveedor de GPS y descargará datos frescos de GPS. Esto debería resultar en una solución de Fix. Es posible que necesites conducir el robot brevemente usando el joystick.
Alternativamente, intenta apagar el robot durante 3 a 5 minutos. Esto también puede despejar la caché del receptor GNSS y restablecer su conexión.
Otros factores que pueden causar un arreglo flotante
Muchos factores fuera de nuestro control pueden causar problemas de arreglo FLOAT. Si ninguna de las soluciones anteriores funciona, por favor contacta al soporte aquí.
Estos problemas pueden incluir:
- Problemas con el proveedor de GNSS.
- Estaciones de referencia GPS sin conexión.
- Estaciones de referencia GPS demasiado lejanas.
- Nubes mixtas o malas condiciones meteorológicas.
- Alta actividad solar