Wenn Ihr TinyLineMarker-Roboter im 'Float Fix'-Modus stecken bleibt, bedeutet dies, dass er Schwierigkeiten hat, ein genaues GPS-Signal zu empfangen. Diese Anleitung führt Sie durch häufige Ursachen und Schritte zur Fehlerbehebung, um wieder präzise Linien zu markieren.
Die TinyLineMarker-Roboter verwenden RTK (Real-Time Kinematic)-Positionierung, um Linien mit hoher Genauigkeit zu markieren. Es gibt verschiedene Genauigkeitsstufen der Positionierung, und unsere Linienmarkierungsroboter verwenden nur die höchste Stufe.
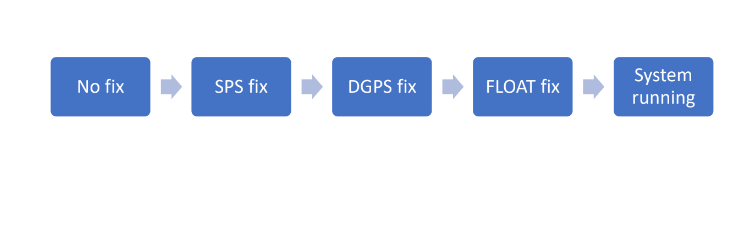
Kein Fix bedeutet, dass der Roboter überhaupt keine Kenntnis über seine Position hat.
SPS (Standard Positioning Service) ist der erste Positionsfix, den GPS-Systeme erreichen. Jeder weitere Schritt erreicht eine höhere Genauigkeitsstufe. (3-10 Meter).
DGPS (Differential Global Positioning System) erhöht die Genauigkeit auf 1-3 cm.
Float Fix ist ein weniger genauer GPS-Positionierungszustand.
System läuft auch bekannt als Fix ist der Zustand mit der höchsten Genauigkeitsstufe.
In einigen Fällen kann es vorkommen, dass der Roboter im Float Fix-Modus stecken bleibt, wie in diesem Bild zu sehen:
Wenn dies der Fall ist, folgen Sie bitte der unten gezeigten Fehlerbehebungsanleitung.
Fehlerbehebung bei Float Fix
Befindet sich der Roboter in der Nähe von Objekten?
Für optimale Leistung halten Sie den Roboter frei von Hindernissen wie Autos, Traktoren, Menschen, Wänden und Zäunen. Diese können die Satellitensignale blockieren und verhindern, dass sie korrekt funktionieren. Versuchen Sie Folgendes:
- Bewegen Sie den Roboter in ein offenes Gebiet, fern von möglichen Hindernissen.
- Warten Sie, bis der Roboter den FIX-Modus erreicht (angezeigt durch ein grünes Licht). Dies kann einige Momente dauern.
- Wenn das Problem weiterhin besteht, starten Sie den Roboter neu, nachdem Sie ihn an einen freien Ort bewegt haben.
Versuchen Sie, in der Nähe von Gebäuden oder Bäumen zu markieren?
Hindernisse wie Gebäude und Bäume können die Sicht der Antenne auf den Himmel behindern, das Signal schwächen und möglicherweise dazu führen, dass der Roboter in den FLOAT-Fix-Zustand wechselt. Die Baumfilter-Funktion kann in solchen Situationen helfen, ist jedoch bei sehr hohen Gebäuden nicht wirksam. So aktivieren Sie den Baumfilter:
- Wählen Sie das Feld aus, in dem Sie den Baumfilter aktivieren möchten. Tippen Sie auf "Ändern", dann auf "Bearbeiten".
- Tippen Sie im nächsten Menü auf "Fortgeschritten".
- Beachten Sie die Baumfilterfarbe und tippen Sie mehrmals auf die gewünschten Linien, bis sie orange werden. Tippen Sie dann auf "OK".
- Speichern Sie das Feld und beginnen Sie dann mit dem Malen.
Tipp: Wenn Sie in der Nähe von Objekten markieren, versuchen Sie, den Roboter zu verlangsamen, um seine Fähigkeit zur Empfang von GPS-Korrektursignalen zu verbessern. Dies könnte seine Genauigkeit erhöhen.
Haben Sie versucht, den Mount Point zu ändern?
Der Mount Point bestimmt, wie der Roboter sein GPS-Signal erhält. Er gibt die Art der verwendeten Technologie an, welche Satelliten der Roboter verbindet und wie die Signale korrigiert werden.
Wenn Sie Probleme mit der Float-Fixierung haben, könnte eine Lösung darin bestehen, den Mount Point manuell am Roboter zu ändern. Dieser Vorgang ist sofort und erfordert keinen Neustart. Die Mount Point-Konfigurationen variieren je nach Region oder Land, daher kontaktieren Sie den Support für eine Liste der verfügbaren Optionen in Ihrer Region. Um den Mount Point zu ändern, können Sie die folgenden Schritte ausführen:
- Öffnen Sie das Einstellungsmenü (
).
- Gehen Sie im Einstellungsmenü auf die Registerkarte "Kommunikation" und finden Sie das Textfeld Mount Point.
- Geben Sie einen anderen von Support bereitgestellten Mount Point ein und tippen Sie auf "Speichern". Jedes Mal, wenn Sie speichern, wird ein neuer Satz von "gespeicherten Einstellungen" erstellt, was die spätere Auswahl erleichtert.
- Schließen Sie das Menü und steuern Sie dann den Roboter manuell mit dem Joystick. Dies sollte hoffentlich das Problem lösen und das Roboterlicht grün leuchten lassen.
Haben Sie versucht, den GNSS-Empfänger zurückzusetzen?
Der Roboter verwendet einen fortgeschrittenen GNSS-Chip zur Verarbeitung von GPS-Signalen. Manchmal kann der Chip mit Daten überlastet werden und nicht mehr reagieren. Um dies zu beheben, versuchen Sie, die NTRIP-Server-Einstellungen wie unten beschrieben anzupassen.
- Öffnen Sie das Einstellungsmenü (
- Gehen Sie auf die Registerkarte "Kommunikation" und finden Sie das Textfeld "NTRIP-Server".
- Nehmen Sie eine kleine, vorübergehende Änderung an der Einstellung "NTRIP-Server" vor (merken Sie sich die ursprüngliche Einstellung). Drücken Sie "Speichern", was einen NTRIP-Server-Fehler auslösen sollte. Setzen Sie die Einstellung wieder auf die ursprüngliche zurück und drücken Sie erneut "Speichern".
Der Roboter wird sich erneut mit dem GPS-Anbieter verbinden und frische GPS-Daten herunterladen. Dies sollte zu einer Fix-Lösung führen. Möglicherweise müssen Sie den Roboter kurz mit dem Joystick herumfahren.
Alternativ können Sie versuchen, den Roboter für 3 bis 5 Minuten auszuschalten. Dies kann auch den Cache des GNSS-Empfängers löschen und seine Verbindung zurücksetzen.
Sonstige Faktoren, die einen Float-Fix verursachen können
Viele Faktoren außerhalb unserer Kontrolle können FLOAT-Fix-Probleme verursachen. Wenn keine der oben genannten Lösungen funktioniert, kontaktieren Sie bitte den Support hier.
Diese Probleme können umfassen:
- Probleme mit dem GNSS-Anbieter.
- GPS-Referenzstationen offline.
- GPS-Referenzstationen sind zu weit entfernt.
- Gemischte Wolken oder schlechte Wetterbedingungen.
- Hohe Sonnenaktivität