如果您的 TinyLineMarker 机器人卡在“浮动修正”模式,这意味着它在获取准确的 GPS 信号时遇到了困难。本指南将引导您了解常见原因和故障排除步骤,以帮助您恢复精确的线标记。
TinyLineMarker 机器人使用 RTK(实时动态)定位来高精度地绘制线条。定位精度有不同的级别,我们的线标记机器人只使用最高级别的定位精度。
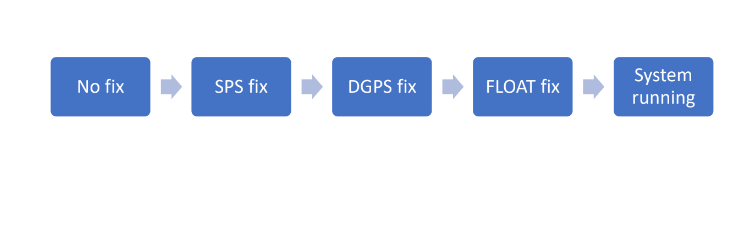
无修正意味着机器人完全没有定位感知。
SPS(标准定位服务)是 GPS 系统实现的第一个位置修正。每增加一步,精度都会提高。(3-10 米)。
DGPS(差分全球定位系统)精度提高到 1-3 厘米。
浮动修正是一种较不精确的 GPS 定位状态。
系统运行也称为修正,是精度最高的状态。
在某些情况下,您可能会遇到机器人卡在浮动修正状态,如下图所示:
如果是这种情况,请按照下面的故障排除指南进行操作。
浮动修正故障排除
机器人附近有物体吗?
为了获得最佳性能,请确保机器人远离汽车、拖拉机、人、墙和围栏等障碍物。这些物体可能会阻挡卫星信号,导致其无法正常工作。请尝试以下操作:
- 将机器人移到远离任何潜在障碍物的开阔区域。
- 等待机器人获取修正模式(由绿灯指示)。这可能需要几分钟。
- 如果问题仍然存在,请在将机器人移到清晰位置后重新启动它。
您是否尝试在建筑物或树木附近绘制线条?
障碍物,如建筑物和树木,可能会阻挡天线的天空视野,削弱信号,可能导致机器人进入浮动修正状态。树木过滤功能可以在这种情况下提供帮助,但对于非常高的建筑物则无效。以下是激活树木过滤功能的方法:
- 选择您要启用树木过滤的场地。点击“修改”,然后按“编辑”。
- 在下一个菜单中,点击“高级”。
- 注意树木过滤的颜色,并多次点击所需的线条,直到其变为橙色。然后点击“确定”。
- 保存字段,然后开始绘制。
提示:在标记靠近物体时,尝试减慢机器人的速度,以增强其接收GPS校正信号的能力。这可能会提高其准确性。
您尝试过更改安装点吗?
安装点决定了机器人如何获取GPS信号。它指定了使用的技术类型、机器人连接的卫星以及信号的校正方式。
如果您遇到浮动修正问题,解决方案可能是手动更改机器人的安装点。此过程是即时的,不需要重启。安装点配置因地区或国家而异,请联系支持以获取您所在地区的可用选项列表。要更改安装点,您可以按照以下步骤操作:
- 找到并点击设置菜单(
)。
- 在设置菜单中,进入"通信"选项卡,找到安装点文本字段。
- 输入支持提供的不同安装点并点击“保存”。每次保存时,都会创建一组新的“存储设置”,以后选择起来很方便。
- 关闭菜单,然后使用操纵杆手动控制机器人。希望这能解决问题并使机器人灯变绿。
您尝试过重置GNSS接收器吗?
机器人使用先进的GNSS芯片来处理GPS信号。有时芯片可能会因数据过载而变得无响应。要解决此问题,请尝试按照以下描述调整NTRIP服务器设置。
- 找到并点击设置菜单(
- 进入"通信"选项卡,找到“NTRIP服务器”文本字段。
- 对“NTRIP服务器”设置进行一个小的临时更改(记住原始设置)。按“保存”,这应该会触发NTRIP服务器错误。将设置恢复到原始状态并再次按“保存”。
机器人将重新连接到GPS提供商并下载新的GPS数据。这应该会导致一个Fix解决方案。您可能需要使用操纵杆短暂地驾驶机器人。
或者,尝试关闭机器人3到5分钟。这也可以清除GNSS接收器的缓存并重置其连接。
其他可能导致浮动修正的因素
许多我们无法控制的因素可能会导致FLOAT修正问题。如果上述解决方案都不起作用,请点击这里联系支持。
这些问题可能包括:
- GNSS提供商的问题。
- GPS参考站离线。
- GPS参考站距离太远。
- 混合云或恶劣天气条件。
- 高太阳活动。