Om din TinyLineMarker-robot fastnar i 'Float Fix'-läge betyder det att den har problem med att få en exakt GPS-signal. Denna guide kommer att gå igenom vanliga orsaker och felsökningssteg för att få dig tillbaka till precis linjemarkering
TinyLineMarker-robotarna använder RTK (Real-Time Kinematic) positionering för att måla linjer med hög noggrannhet. Det finns olika nivåer av positionsnoggrannhet, och våra linjemarkeringsrobotar använder endast den högsta nivån.
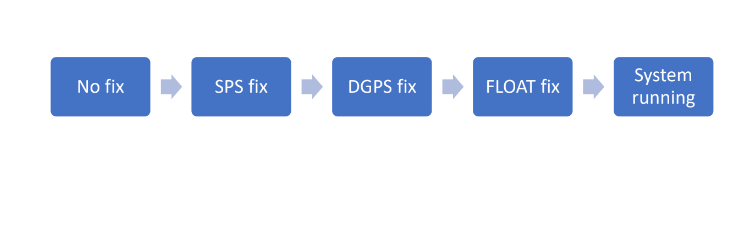
Ingen fix betyder att roboten inte har någon uppfattning om sin position alls.
SPS (Standard Positioning Service) är den första positionsfixen som GPS-system uppnår. Varje steg uppnår en högre nivå av noggrannhet. (3-10 meter).
DGPS (Differential Global Positioning System) noggrannheten ökar till 1-3 cm.
Float fix är ett mindre noggrant GPS-positioneringsläge.
Systemet körs även känt som Fix är läget med den högsta noggrannhetsnivån.
I vissa fall kan du uppleva att roboten fastnar i Float fix som visas på denna bild:
Om detta är ditt fall, följ felsökningsguiden nedan.
Felsökning av Float fix
Är roboten nära några objekt?
För optimal prestanda, håll roboten fri från hinder som bilar, traktorer, människor, väggar och staket. Dessa kan blockera satellitsignalerna och förhindra att de fungerar korrekt. Prova följande:
- Flytta roboten till ett öppet område bort från eventuella hinder.
- Vänta på att roboten ska få FIX-läge (indikerat av ett grönt ljus). Detta kan ta några ögonblick.
- Om problemet kvarstår, starta om roboten efter att ha flyttat den till en fri plats.
Försöker du måla nära byggnader eller träd?
Hinder, såsom byggnader och träd, kan blockera antennens sikt mot himlen, försvaga signalen och potentiellt orsaka att roboten går in i FLOAT fix-läge. Trädfilterfunktionen kan hjälpa i sådana situationer, men den är inte effektiv för mycket höga byggnader. Så här aktiverar du Trädfilter:
- Välj fältet där du vill aktivera Trädfilter. Tryck på "Ändra", tryck sedan på "Redigera".
- På nästa meny, tryck på "Avancerad".
- Notera Trädfilterfärgen och tryck på de önskade linjerna flera gånger tills den blir orange. Tryck sedan på "OK".
- Spara planen och börja sedan måla.
Tips: När du markerar nära objekt, försök att sakta ner roboten för att förbättra dess förmåga att ta emot GPS-korrigeringssignaler. Detta kan öka dess noggrannhet.
Har du försökt byta monteringspunkt?
Monteringspunkten bestämmer hur roboten får sin GPS-signal. Den specificerar vilken typ av teknik som används, vilka satelliter roboten ansluter till och hur signalerna korrigeras.
Om du har problem med flytfix, kan en lösning vara att manuellt byta monteringspunkt på roboten. Denna process är omedelbar och kräver ingen omstart. Monteringspunktkonfigurationer varierar beroende på region eller land, så vänligen kontakta support för en lista över tillgängliga alternativ i ditt område. För att byta monteringspunkt kan du följa dessa steg:
- Hitta och tryck på inställningsmenyn (
).
- I inställningsmenyn, gå till fliken "Kommunikation" och hitta textfältet för Monteringspunkt.
- Skriv in en annan monteringspunkt som tillhandahålls av support och tryck på "Spara". Varje gång du sparar skapas en ny uppsättning "lagrade inställningar", vilket gör det enkelt att välja från senare.
- Stäng menyn och kontrollera sedan manuellt roboten med hjälp av joysticken. Detta bör förhoppningsvis lösa problemet och göra robotens ljus grönt.
Har du försökt återställa GNSS-mottagaren?
Roboten använder ett avancerat GNSS-chip för att bearbeta GPS-signaler. Ibland kan chipet bli överbelastat med data och bli oresponsivt. För att lösa detta, försök att justera NTRIP serverinställningarna enligt beskrivningen nedan.
- Hitta och tryck på inställningsmenyn (
- Gå in på fliken "Kommunikation" och hitta textfältet "NTRIP server".
- Gör en mindre, tillfällig ändring av inställningen "NTRIP server" (kom ihåg den ursprungliga inställningen). Tryck på "Spara", vilket bör utlösa ett NTRIP serverfel. Återställ inställningen till den ursprungliga och tryck på "Spara" igen.
Roboten kommer att återansluta till GPS-leverantören och ladda ner ny GPS-data. Detta bör resultera i en Fix-lösning. Du kan behöva köra roboten en kort stund med hjälp av joysticken.
Alternativt kan du prova att stänga av roboten i 3 till 5 minuter. Detta kan också rensa GNSS-mottagarens cache och återställa dess anslutning.
Övriga faktorer som kan orsaka float fix
Många faktorer utanför vår kontroll kan orsaka FLOAT fix-problem. Om ingen av ovanstående lösningar fungerar, vänligen kontakta support här.
Dessa problem kan inkludera:
- Problem med GNSS-leverantören.
- GPS-referensstationer offline.
- GPS-referensstationer är för långt borta.
- Blandade moln eller dåliga väderförhållanden.
- Hög solaktivitet