Si votre robot TinyLineMarker reste bloqué en mode 'Float Fix', cela signifie qu'il a du mal à obtenir un signal GPS précis. Ce guide vous expliquera les causes courantes et les étapes de dépannage pour revenir à un marquage de ligne précis.
Les robots TinyLineMarker utilisent le positionnement RTK (cinématique en temps réel) pour peindre des lignes avec une grande précision. Il existe différents niveaux de précision de positionnement, et nos robots de marquage de lignes n'utilisent que le niveau le plus élevé.
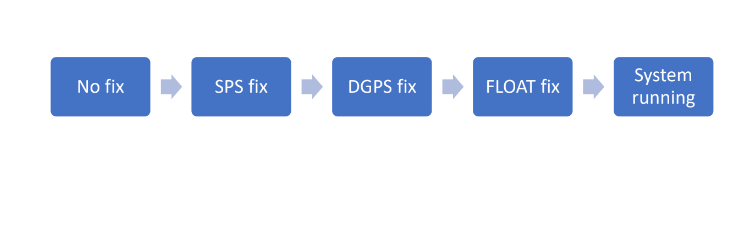
Pas de correction signifie que le robot n'a aucune idée de sa position.
SPS (Service de Positionnement Standard) est la première correction de position que les systèmes GPS obtiennent. Chaque étape supplémentaire atteint un niveau de précision supérieur. (3-10 mètres).
DGPS (Système de Positionnement Global Différentiel) la précision augmente à 1-3 cm.
Float fix est un état de positionnement GPS moins précis.
Système en cours d’exécution également connu sous le nom de Fix est l'état avec le plus haut niveau de précision.
Dans certains cas, vous pourriez rencontrer le robot bloqué en mode Float fix comme illustré sur cette image :
Si c'est votre cas, veuillez suivre le guide de dépannage ci-dessous.
Dépannage du mode Float fix
Le robot est-il à proximité d'objets ?
Pour des performances optimales, gardez le robot à l'écart des obstructions telles que les voitures, les tracteurs, les personnes, les murs et les clôtures. Ceux-ci peuvent bloquer les signaux satellites et les empêcher de fonctionner correctement. Essayez ce qui suit :
- Déplacez le robot dans une zone dégagée, loin de toute obstruction potentielle.
- Attendez que le robot acquière le mode FIX (indiqué par une lumière verte). Cela peut prendre quelques instants.
- Si le problème persiste, redémarrez le robot après l'avoir déplacé dans un endroit dégagé.
Essayez-vous de peindre à proximité de bâtiments ou d'arbres ?
Les obstacles, tels que les bâtiments et les arbres, peuvent obstruer la vue de l'antenne sur le ciel, affaiblissant le signal et pouvant amener le robot à entrer en mode FLOAT fix. La fonction Filtre d’arbres peut aider dans de telles situations, mais elle n'est pas efficace pour les bâtiments très hauts. Voici comment activer le Filtre d’arbres :
- Sélectionnez le terrain où vous souhaitez activer le Filtre d’arbres. Appuyez sur "Modifier", puis appuyez sur "Éditer".
- Dans le menu suivant, appuyez sur "Avancé".
- Notez la couleur du Filtre d’arbres et appuyez plusieurs fois sur les lignes souhaitées jusqu'à ce qu'elles deviennent orange. Ensuite, appuyez sur "OK".
- Sauvegarder le terrain et ensuite commencer la peinture.
Astuce : Lors du marquage à proximité des objets, essayez de ralentir le robot pour améliorer sa capacité à recevoir les signaux de correction GPS. Cela pourrait augmenter sa précision.
Avez-vous essayé de modifier le point de montage ?
Le point de montage détermine comment le robot obtient son signal GPS. Il spécifie le type de technologie utilisée, les satellites auxquels le robot se connecte et comment les signaux sont corrigés.
Si vous rencontrez des problèmes avec la correction flottante, une solution pourrait être de modifier manuellement le point de montage sur le robot. Ce processus est immédiat et ne nécessite pas de redémarrage. Les configurations de point de montage varient selon la région ou le pays, veuillez donc contacter le support pour obtenir une liste des options disponibles dans votre région. Pour modifier le point de montage, vous pouvez suivre ces étapes :
- Localisez et appuyez sur le menu des réglages (
).
- Dans le menu des réglages, allez à l'onglet "Communication" et trouvez le champ de texte Point de Montage.
- Saisissez un point de montage différent fourni par le support et appuyez sur "Sauvegarder". Chaque fois que vous sauvegardez, un nouvel ensemble de "réglages enregistrés" est créé, ce qui facilite le choix ultérieur.
- Fermez le menu et contrôlez manuellement le robot à l'aide du joystick. Cela devrait, espérons-le, résoudre le problème et allumer la lumière du robot en vert.
Avez-vous essayé de réinitialiser le récepteur GNSS ?
Le robot utilise une puce GNSS avancée pour traiter les signaux GPS. Parfois, la puce peut être surchargée de données et devenir non réactive. Pour résoudre ce problème, essayez de modifier les réglages du serveur NTRIP comme décrit ci-dessous.
- Localisez et appuyez sur le menu des réglages (
- Entrez dans l'onglet "Communication" et trouvez le champ de texte "Serveur NTRIP".
- Faites une modification mineure et temporaire du réglage "Serveur NTRIP" (souvenez-vous du réglage d'origine). Appuyez sur "Sauvegarder", ce qui devrait déclencher une erreur de serveur NTRIP. Revenez au réglage d'origine et appuyez à nouveau sur "Sauvegarder".
Le robot se reconnectera au fournisseur de GPS et téléchargera des données GPS fraîches. Cela devrait aboutir à une solution Fix. Vous devrez peut-être conduire le robot brièvement en utilisant le joystick.
Alternativement, essayez d'éteindre le robot pendant 3 à 5 minutes. Cela peut également effacer le cache du récepteur GNSS et réinitialiser sa connexion.
Autres facteurs pouvant causer un fix flottant
De nombreux facteurs hors de notre contrôle peuvent causer des problèmes de fix flottant. Si aucune des solutions ci-dessus ne fonctionne, veuillez contacter le support ici.
Ces problèmes peuvent inclure :
- Problèmes avec le fournisseur de GNSS.
- Stations de référence GPS hors ligne.
- Stations de référence GPS trop éloignées.
- Nuages mixtes ou mauvaises conditions météorologiques.
- Forte activité solaire