Hvis din TinyLineMarker-robot sidder fast i 'Float Fix'-tilstand, betyder det, at den har problemer med at få et præcist GPS-signal. Denne guide vil føre dig gennem de mest almindelige årsager, samt vejlede dig for at få dig tilbage til en præcis linjemarkering.
TinyLineMarker-robotterne bruger RTK (Real-Time Kinematic) positionering til at male linjer med høj nøjagtighed. Der er forskellige niveauer af positioneringsnøjagtighed, og vores linjemarkeringsrobotter bruger kun det højeste niveau.
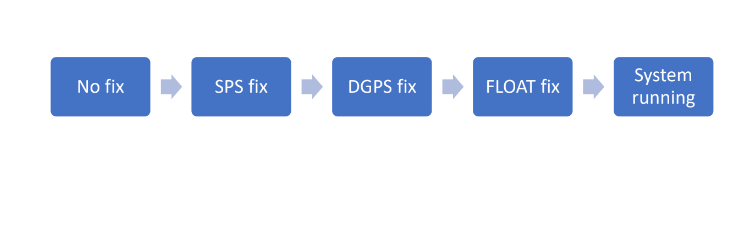
No fix betyder, at robotten slet ikke har nogen fornemmelse af sin position.
SPS (Standard Positioning Service) er den første positionsfix, som GPS-systemer opnår. Hvert stigende trin opnår et højere niveau af nøjagtighed. (3-10 meter).
DGPS (Differential Global Positioning System) nøjagtigheden øges til 1-3 cm.
Float fix er en mindre præcis GPS-positioneringstilstand.
System running også bare kendt som Fix er tilstanden med det højeste niveau af nøjagtighed.
I nogle tilfælde kan du opleve, at robotten sidder fast i Float fix som vist på dette billede:
Hvis dette er tilfældet, skal du følge guiden vist nedenfor.
Problemløsning af Float fix
Er robotten i nærheden af nogen genstande?
For optimal ydeevne skal du holde robotten fri for forhindringer som biler, traktorer, mennesker, træer, vægge og hegn. Disse kan blokere satellitsignalerne og forhindre dem i at fungere korrekt. Prøv følgende:
- Flyt robotten til et åbent område væk fra eventuelle forhindringer.
- Vent på, at robotten opnår FIX-tilstand (indikeret af et grønt lys). Dette kan tage et par øjeblikke.
- Hvis problemet fortsætter, skal du genstarte robotten efter at have flyttet den til en åben placering.
Forsøger du at male nær bygninger eller træer?
Forhindringer, såsom bygninger og træer, kan blokere antennens udsyn til himlen, hvilket svækker signalet og potentielt få robotten til at gå i en FLOAT fix-tilstand. Træfilterfunktionen kan hjælpe i sådanne situationer, men den er ikke effektiv for meget høje bygninger. Sådan aktiverer du Træfilteret:
1) Vælg banen, hvor du vil aktivere Træfilteret. Tryk på "Ændre", og tryk derefter på "Rediger".
2) Tryk derefter på "Avanceret".
3) Bemærk Træfilterets farve og tryk på de ønskede linjer flere gange, indtil de bliver orange. Tryk derefter på "OK".
4) Gem banen og start derefter med at male.
Tip: Når du markerer tæt på objekter, så prøv at sænke robottens hastighed for at forbedre dens evne til at modtage GPS-korrektionssignaler. Dette kan øge dens nøjagtighed.
Har du prøvet at skifte mountpoint?
Mountpoint bestemmer, hvordan robotten får sit GPS-signal. Det specificerer den anvendte teknologi, der bruges, hvilke satellitter robotten opretter forbindelse til, og hvordan signalerne korrigeres.
Hvis du har problemer med float fix, kan en løsning være manuelt at ændre mountpoint på robotten. Denne proces er øjeblikkelig og kræver ikke en genstart. Mountpoint konfigurationer varierer efter region eller land, så kontakt venligst support for en liste over tilgængelige muligheder i dit område. For at ændre mountpoint kan du følge disse trin:
- Find og tryk på indstillinger(
).
- I indstillinger skal du gå til fanen "Kommunikation" og finde tekstfeltet mountpoint.
- Indtast et andet mountpoint som du har fået af support og tryk på "Gem". Hver gang du gemmer, oprettes et nyt sæt "gemte indstillinger", hvilket gør det nemt at vælge fra senere.
- Luk menuen og kontroller derefter manuelt robotten ved hjælp af joysticket. Dette skulle forhåbentlig løse problemet og få robotlyset til at blive grønt.
Har du prøvet at nulstille GNSS-modtageren?
Robotten bruger en avanceret GNSS-chip til at behandle GPS-signaler. Nogle gange kan chippen blive overbelastet med data og blive uresponsiv. For at løse dette, prøv at justere NTRIP serverindstillingerne som beskrevet nedenfor.
- Find og tryk på indstillingsmenuen(
- Gå ind i fanen "Kommunikation" og find tekstfeltet "NTRIP server".
- Foretag en mindre, midlertidig ændring af indstillingen "NTRIP server" (husk den oprindelige indstilling). Tryk på "Gem", hvilket skulle udløse en NTRIP serverfejl. Gendan indstillingen til den oprindelige og tryk på "Gem" igen.
Robotten vil genoprette forbindelse til GPS-udbyderen og downloade nye GPS-data. Dette burde resultere i en Fix-løsning. Du skal muligvis køre robotten lidt rundt ved hjælp af joysticket.
Alternativt kan du prøve at slukke robotten i 3 til 5 minutter. Dette kan også rydde GNSS-modtagerens cache og nulstille dens forbindelse.
Andre faktorer, der kan forårsage float fix
Mange faktorer uden for vores kontrol kan forårsage problemer med FLOAT fix. Hvis ingen af de ovenstående løsninger virker, bedes du kontakte support her.
Disse problemer kan omfatte:
- Problemer med GNSS-udbyderen.
- GPS-referencestationer offline.
- GPS-referencestationer er for langt væk.
- Skyer eller dårlige vejrforhold.
- Høj solaktivitet